Study Notes
Overview
Vectors are a fundamental concept in mathematics and physics, representing quantities that possess both magnitude (size) and direction. For AQA A-Level Mathematics, this topic (specification point 3.12) moves beyond simple GCSE vectors into the complexities of two and three-dimensional space. Mastery of vectors is not just about manipulating numbers; it is about developing a deep spatial awareness and the ability to construct rigorous geometric arguments. It forms the bedrock of mechanics and has significant links to pure mathematics, particularly geometry and algebra. In exams, candidates can expect to see vectors applied in a variety of contexts, from pure geometric proofs involving collinearity and intersections, to applied problems in mechanics dealing with forces and velocities. A typical question will require you to move fluently between i, j, k notation and column vectors, calculate magnitudes, and use the scalar product to solve problems.
Key Concepts
Concept 1: Vector Notation and Representation
A vector can be represented in several ways, and candidates must be fluent in all of them. The most common are component form (using unit vectors i, j, and k) and column vectors.
-
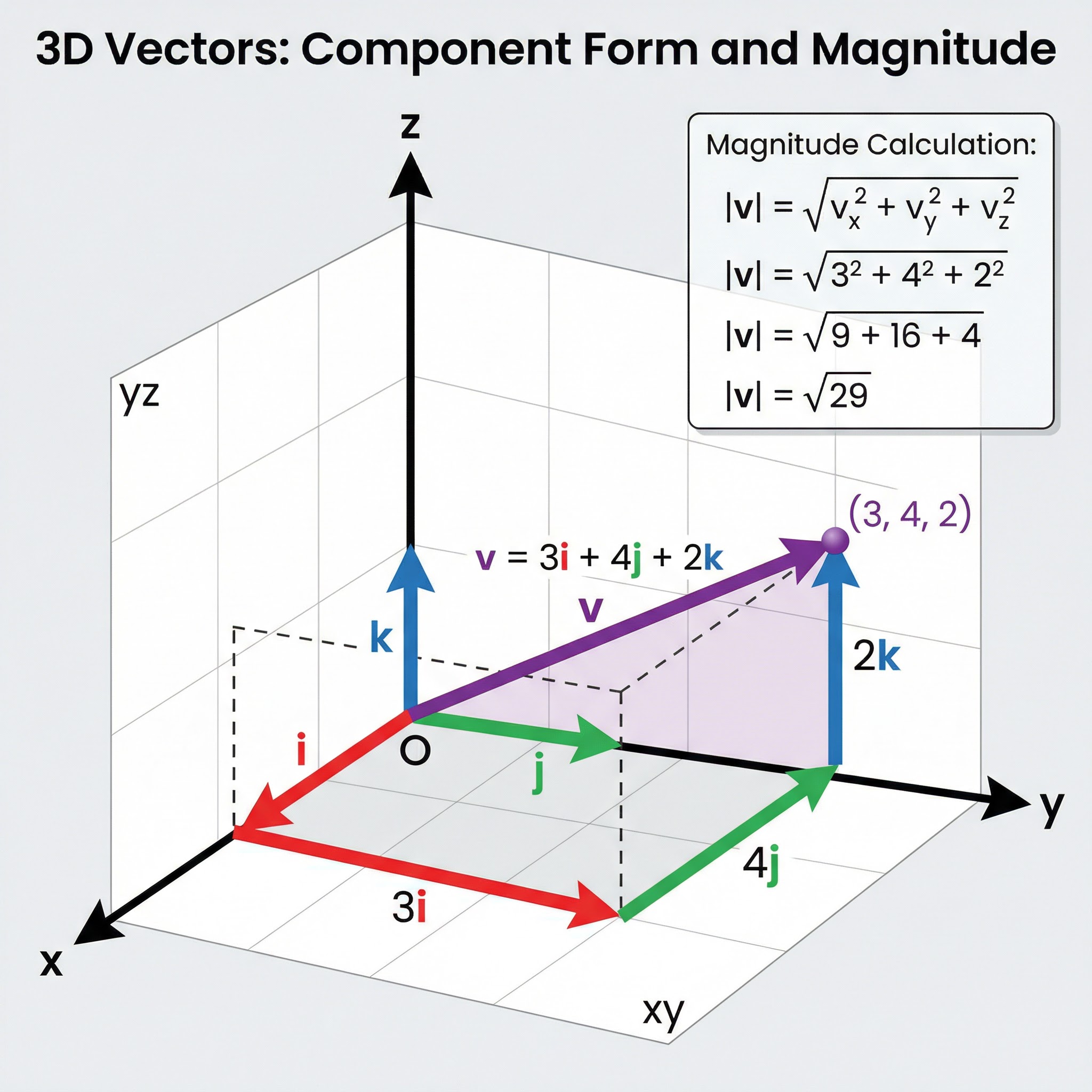
Component Form: A vector is expressed as a sum of scalar multiples of the standard unit vectors i, j, and k. These unit vectors have a magnitude of 1 and lie along the positive x, y, and z axes, respectively. For example, the vector v = 3i + 4j - 2k represents a displacement of 3 units in the x-direction, 4 in the y-direction, and -2 in the z-direction.
-
Column Vector Form: The same vector v can be written as a column matrix. This is often more convenient for arithmetic operations.
/ 3
v = | 4 |
\ -2 /
It is crucial to use correct notation in exams. Vectors should be underlined (e.g., v) or have an arrow above them. Failing to distinguish vectors from scalars can result in lost marks for lack of clarity.
Concept 2: Position and Displacement Vectors
- Position Vector: A position vector describes the location of a point in space relative to a fixed origin, O. The position vector of a point A is denoted OA or simply a. If point A has coordinates (x, y, z), then its position vector is a = xi + yj + zk.
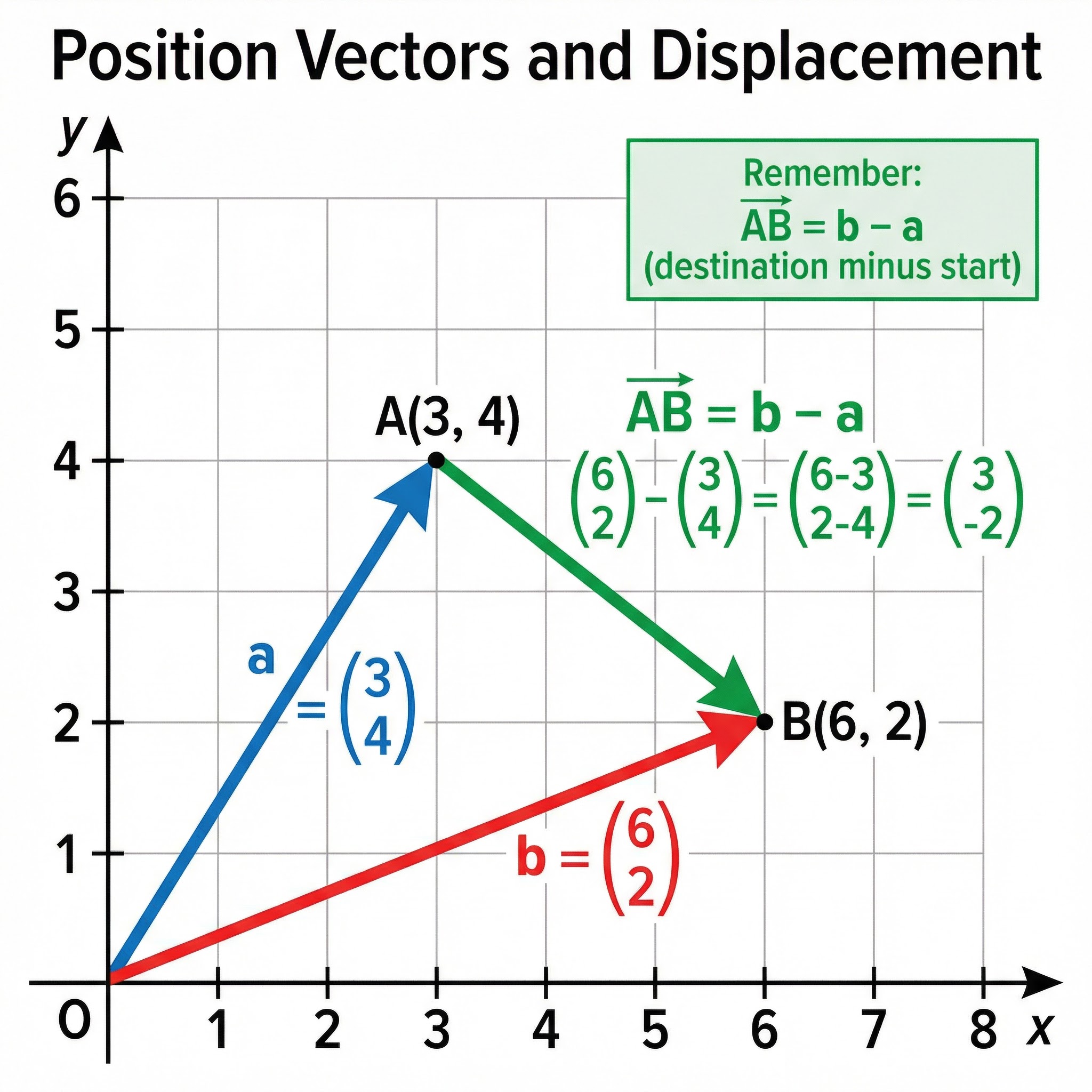
- Displacement Vector: A displacement vector represents the shortest path from one point to another. The displacement vector from point A to point B, denoted AB, is found by subtracting the position vector of the start point from the position vector of the end point.
Key Formula: AB = b - aThis is a frequent source of error. Candidates often calculate a - b by mistake, which gives the vector BA. Always remember: destination minus origin.
Concept 3: Magnitude and Unit Vectors
- Magnitude: The magnitude (or modulus) of a vector is its length. It is a scalar quantity and is denoted by vertical bars, |a|. The magnitude is calculated using Pythagoras's theorem in 3D.
Formula (Must memorise): For a vector a = xi + yj + zk, its magnitude is |a| = √(x² + y² + z²)
Examiners award a method mark (M1) for the correct application of this formula, including squaring all components. A common mistake is to incorrectly handle negative components; remember that (-y)² = y².
- Unit Vector: A unit vector is a vector with a magnitude of 1. To find the unit vector in the direction of a vector a, you divide the vector by its magnitude.
Formula (Must memorise): The unit vector â is given by â = a / |a|
Credit is given for correctly calculating the magnitude first (M1) and then dividing the original vector by this scalar value (A1).
Concept 4: Vector Arithmetic
Vector arithmetic is straightforward and involves operating on the corresponding components.
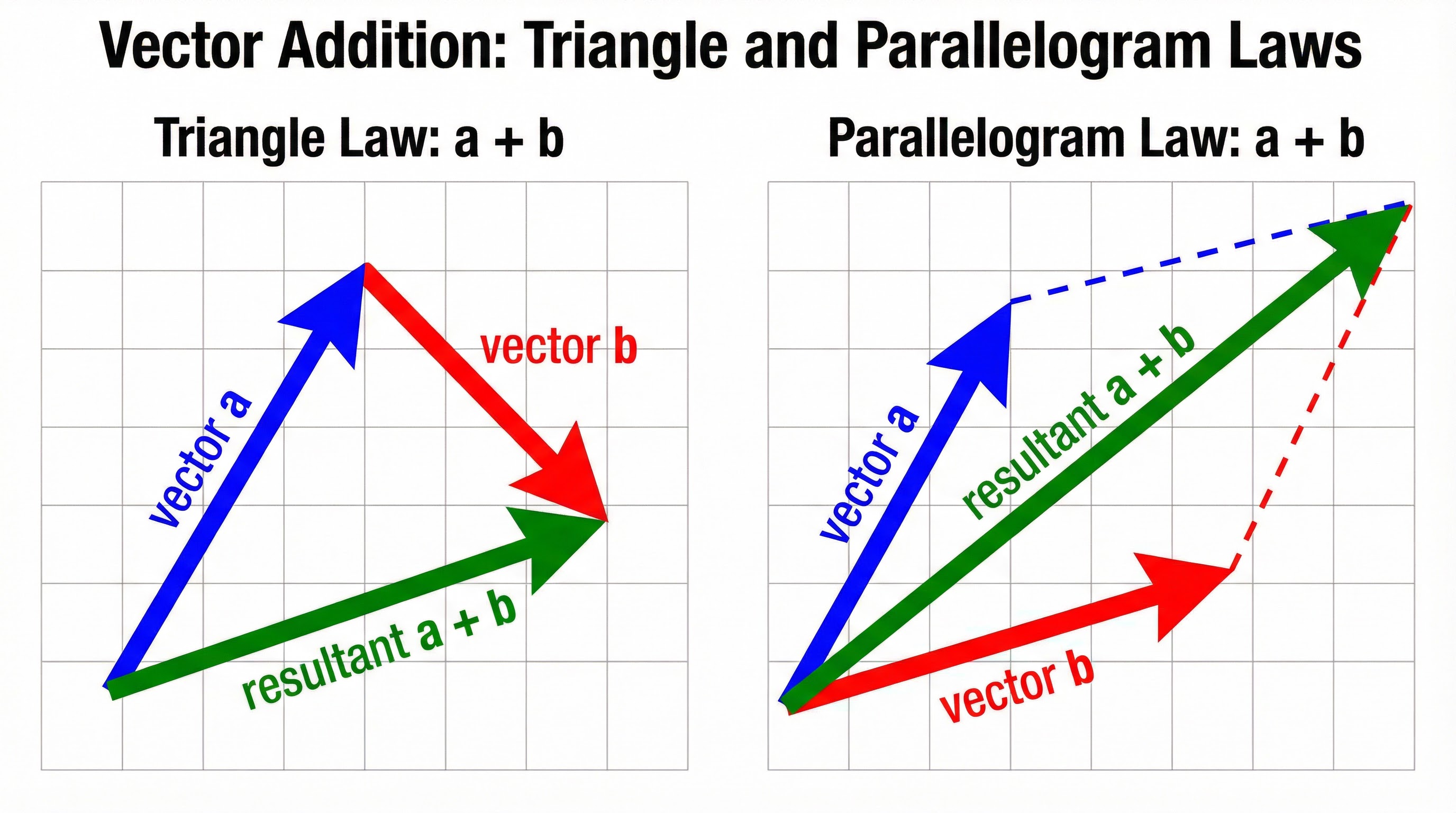
- Addition/Subtraction: To add or subtract vectors, you add or subtract their corresponding i, j, and k components.
Example: If a = 2i + 5j and b = i - 3j, then a + b = (2+1)i + (5-3)j = 3i + 2j.
Geometrically, this is represented by the Triangle Law or Parallelogram Law of vector addition.
- Scalar Multiplication: To multiply a vector by a scalar, you multiply each component by that scalar. This changes the magnitude of the vector but not its direction (unless the scalar is negative, in which case the direction is reversed).
Example: 3a = 3(2i + 5j) = 6i + 15j.
Concept 5: Geometric Proofs
Vectors are a powerful tool for proving geometric properties. Two key proofs are showing vectors are parallel and showing points are collinear.
-
Parallel Vectors: Two vectors a and b are parallel if one is a scalar multiple of the other. That is, a = kb for some non-zero scalar k. To prove this, you must show that the ratio of corresponding components is constant.
-
Collinear Points: Three points A, B, and C are collinear (lie on the same straight line) if the vector AB is a scalar multiple of the vector BC (or AC).
Two Conditions for Collinearity:
- The vectors are parallel (e.g., AB = k * BC).
- They share a common point (in this case, point B).
Candidates must explicitly state both conditions to be awarded full marks. Simply showing the vectors are parallel is not sufficient.
Mathematical/Scientific Relationships
-
Vector Equation of a Line: r = a + λd
- r is the position vector of any point on the line.
- a is the position vector of a known point on the line.
- d is a direction vector parallel to the line.
- λ is a scalar parameter.
This formula is given on the formula sheet.
-
Scalar Product (Dot Product): a · b = |a||b|cos(θ)
- θ is the angle between the two vectors.
- Also, a · b = a₁b₁ + a₂b₂ + a₃b₃
- If a · b = 0, the vectors are perpendicular (orthogonal).
This formula is given on the formula sheet.
Practical Applications
Vectors are not just an abstract mathematical tool. They are essential in many fields:
- Physics and Engineering: To describe forces, velocities, accelerations, and fields (e.g., electric or magnetic fields). When calculating the resultant of multiple forces acting on an object, engineers use vector addition.
- Computer Graphics: In 3D modelling and animation, vectors are used to define the position and orientation of objects, light sources, and cameras. Vector operations are used to render scenes, calculate reflections, and create realistic motion.
- Navigation: GPS systems use vectors to represent location and displacement. Aircraft and ships use vector calculations to determine their course, accounting for wind or water currents.
"